
Категория: Руководства
ПРЕДУПРЕЖДЕНИЕ: SART видим только радаром X-диапазона (3 cm).
Он не будет замечен радаром в S-диапазоне (10 cm).
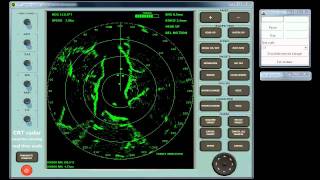
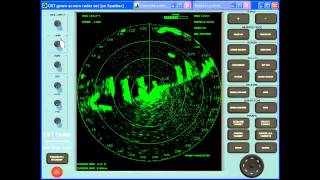
1. Поисково-спасательный ответчик (SART) может быть запущен любым радаром X-диапазона (3cm) в пределах дальности приблизительно 8 n миль. Каждый радарный импульс, излучаемый антенной, принятый SART может стать причиной для передачи ответа. Приемник SART сканирует диапазон возможных частот со скоростью (0.4 msec), при получении сигнала от радара скорость сканирования по диапазону уменьшается до (7.5 msec). Этот процесс повторяется двенадцать законченных циклов. В некоторый момент частота SART будет соответствовать таковой частоте радара в пределах диапазона прохода радиолокационного приемника. Если SART - в пределах дальности, строка из 12 меток, одинаково расположенных примерно на расстоянии 0.64 n мили друг от друга будет отображаться на радиолокационном индикаторе.
2. Когда расстояние до SART уменьшится приблизительно до 1n мили, радиолокационный индикатор может показывать также 12 ответов, которые из-за уменьшения времени ответа принимают вид арок.
Выбор шкалы РЛС
3. При поиске SART предпочтительно использовать шкалу дальности 6 или 12 n миль. Такой выбор обусловлен тем, что общая длина сигнала ответа SART 12 (или 24) точки может увеличиваться приблизительно до 9.5 n миль от позиции SART, и необходимо видеть большее количество точек ответа, чтобы отличить SART от других ответов.
Ошибки дальности SART
4. Когда видны ответы только от 12 низкочастотных сигналов (когда SART на расстоянии большее чем 1n миля), позиция, в которой находится первая точка, может быть вне истинного места SART на расстоянии 0.64n мили. Когда дальность уменьшается и увеличивается скорость ответов ошибка будет составлять не более, чем 150 метров от истинного места.
Ширина полосы радара
5. Она обычно согласована с длительностью импульса и изменяется при переключении шкалы дальности, связанной с длительностью импульса. Узкие полосы 3-5 МГЦ используются с длинными импульсами на больших шкалах дальности, а широкие полосы пропускания 10-25 МГЦ с короткими импульсами на малых дальностях.
6. Ширина полосы радара меньше чем 5 МГЦ уменьшит сигнал SART, поэтому предпочтительно использовать среднюю ширину полосы для гарантированного приема сигналов SART. Для правильного выбора специфических параметров и ширины полосы надо ознакомиться с инструкцией по эксплуатации радара.
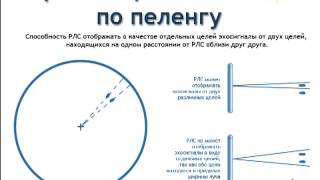
Боковые лепестки диаграммы направленности антенны радара
7. При приближении к SART, боковые лепестки антенны РЛС могут показывать ответы SART как ряд дуг или концентрических колец. Они могут быть удалены при помощи регулирования подавления помех от моря и местных предметов, хотя может быть полезно наблюдать такие сигналы, поскольку они могут быть упростить обнаружение в условиях отражений, и подтвердят, что SART находится около судна.
8. Чтобы увеличивать видимость SART в условиях отражений, настройка радара может быть загрублена для уменьшения отражений. Радары с автоматическим управлением частотой не позволяют загрубления.
Усиление
9. Для максимальной дальности обнаружения SART должна использоваться нормальная установка усиления для большой дальности, с видимой зернистостью фонового шума.
Подавление помех от моря
10. Для оптимальной дальности обнаружение SART эти регуляторы должны быть установлены на минимум.
11. Некоторые РЛС имеют автоматические/ручные средства управления подавлением помех моря и местных предметов. Поскольку функции управления автоматическим подавлением помех могут быть различны у разных производителей рекомендуется первоначально использовать ручное управление, пока SART не будет обнаружен.
Эффект от автоматического управления сигналом ответа SART может быть виден только при сравнении с ручным управлением.
Подавления помех от дождя
12. Оно должно использоваться при попытке обнаружить ответ SART, являющийся рядом точек, в соответсвующих погодных условиях, для разделения зон дождя.
13. Некоторые РЛС имеют автоматические/ручные средства управления подавлением помех от дождя. Поскольку функции управления автоматическим подавлением помех от дождя могут быть различны у разных производителей рекомендуется первоначально использовать ручное управление, пока SART не будет обнаружен.
Эффект от автоматического управления сигналом ответа SART может быть виден только при сравнении с ручным управлением.















Судовые радары обеспечивают уверенное управление судном в темноте, а также в тумане. У нас представлены судовые радары различной мощности 0.1-12000 Вт. Что позволяет устанавливать их на любых судах: моторных лодках, малых патрульных катерах, а также крупнотоннажных пассажирских и грузовых кораблях. Все модели подключатются к дисплею для вывода информации и предельно просты в эксплуатации. Антенна судового радара устанавливается как можно выше над поверхностью воды. Большинство моделей нашего магазина монтируются на крышу судна. Применяя судовые радары, вы повышаете безопасность плавания.
ООО «МР»
Юридический адрес:
199397, г. Санкт-Петербург,
ул. Наличная, дом 40, корпус 7, литер А, пом. 15Н
ИНН 7801279808 КПП 780101001
ОГРН 1157847161185

Цена по запросу
Товар добавлен к сравнению
Произошла автоматическая регистрация, и вы получили цены зарегистрированного клиента. При совершении повторной покупки вы автоматически станете постоянным клиентом и получите соответствующие цены.
Вы успешно зарегистрированы!
С момента появления первых радиолокационных станций прошло уже более полувека. Всё началось с того, что Великобритании в целях оповещения своих граждан о налётах немецкой авиации для предотвращения многочисленных жертв в годы второй мировой войны потребовалось разработать систему обнаружения самолетов противника. В результате по береговому периметру были установлены громоздкие радарные установки. После войны уже не только военная, но и гражданская авиация, флот и космическая промышленность испытали острую необходимость в оснащении различных объектов радиолокационными установками и станциями. С тех пор судовые РЛС подверглись многократным модернизациям. Технический прогресс сделал своё дело: дисплеи радаров изменились от мониторов с лучевой трубкой до оснащенных LCD экраном, а сам приемо-передающий блок принял наиболее минимизированный вид.
Судовые РЛС сегодняВ настоящее время практически все морские суда имеют в своем арсенале радиолокационную станцию, которую по-простому называют РЛС или радар. По большому счету судовые РЛС предназначены для безопасности плавания. Их задача обнаружить любой надводный объект, а также берег в любых погодных условиях и избежать столкновения с ним. В условиях ограниченной видимости (ночь, туман, шторм) радиолокационная станция помогает продолжать безопасный ход судна. Поэтому судовые РЛС пользуются большим спросом у судовладельцев. На мировом рынке существует много производителей радиолокационных станций, но есть компании, которые производят профессиональное оборудование, которое отличает высокое качество морских радаров, к ним относятся. FURUNO. JRC. SAMYUNG. Многие компании выпускают отдельно радарные антенны, которые можно соединить с помощью специального кабеля с другими приборами (многофункциональные дисплеи, картплоттеры, картплоттеры-эхолоты) этого же производителя. Дальность действия морских радаров зависит от мощности излучателя (антенны).
Судовые РЛС: принцип действияВ основе работы судовой РЛС лежит явление эха. Передающее устройство радиолокационной станции производит мощные высокочастотные радиоимпульсы, которые узким лучом распространяются во все стороны, то есть на 360 градусов. За счет этого на экране дисплея радиолокационной станции отображается вся обстановка вокруг на таком расстоянии, которое позволяет охватить мощность передатчика. Если радиоимпульс встречает на своем пути припятствие (судно, берег), то он отражается и возвращается в виде эхо-сигнала на приемник антенны. Пеленг или курсовой угол объекта, от которого отразился радиоимпульс, определяется направлением вернувшегося эхо-сигнала. Расстояние до объекта рассчитывается временем, которое прошло с момента посыла до возврата радиоимпульса. Приемник преобразует принятые эхо-сигналы и передает их на дисплей, в результате на экране появляется картинка с святящимися пятнами (суда, маяки) или волнистой линией (береговая полоса). Святящаяся точка в центре дисплея – судно, на котором и установлена радиолокационная станция. Расстояния до обнаруженных объектов определяется по светящимся кольцам на экране дисплея морского радара.
Судовые РЛС - гарантия безопасного судоходства на море и реке.
+7(495)502-6254 +7(909)667-5856 info@nav-tech.ru Skype: nav-tech2 ICQ: 322-718-556Евгений Богаченко Теги: Радар

Вопрос об определении границ зоны, опасной в отношении излучения антенн судовых радиотехнических средств является исключительно актуальным. Во многих судоходных компаниях внутренние руководящие документы требуют нанесения этих границ на палубе под мачтой (причём не только для локатора, но и для станции спутниковой связи “Inmarsat-F”).
Кроме того, периодически приходится организовывать работу судовых специалистов на значительном расстоянии от источника излучения, но в пределах покрытия его диаграммы направленности. В такой ситуации почти неизбежно возникает конфликт между теми, кто несёт навигационную вахту и теми, кто выполняет упомянутые работы. На борту всегда отсутствуют средства объективного контроля за уровнем электромагнитного излучения, поэтому в такой ситуации спор обычно решается (не всегда обоснованно) в пользу полного отключения всех передающих устройств, и, как следствие, технического «ослепления» навигационной вахты.
На сегодняшний день во всех цивилизованных странах требования к безопасной для здоровья организации рабочего места определяются национальными гигиеническими нормами. В России, например, таковыми (относительно допустимых уровней электромагнитных полей) являются «Санитарно-эпидемиологические правила и нормативы СанПиН 2.2.4.1191-03» «Электромагнитные поля в производственных условиях» (утв. Главным государственным санитарным врачом РФ 30 января 2003 г). Оба типа судовых локаторов (диапазона «S» с рабочей частотой 2900…3100 МГц и диапазона «X» с частотой 9320…9500 МГц) отнесены этим документом к одному классу источников излучения (диапазон радиочастот 300.0 МГц – 300.0 ГГц) и между ними для целей определения безопасных условий работы различий нет. Правилами оговорено два важнейших параметра, подлежащих контролю: плотность потока энергии электромагнитного поля (ППЭ = [мкВт/см2]) и энергетическая экспозиция (ЭЭ = [(мкВт/см2)*ч]). Связь между ними установлена формулой:
ЭЭ = ППЭ * Т,
где Т [ч] – время нахождения под воздействием поля
Максимально допустимая величина ППЭ – 1000 мкВт/см2. При таком значении параметра запрещены любые работы в зоне излучения. Если ППЭ ниже указанной, то подвергаться воздействию такого поля можно только некоторое время, в течение которого величина энергетической экспозиции не превысит максимально допустимой (200 (мкВт/см2)*ч за смену). Пример: если специалист находится в электромагнитном поле с ППЭ = 500 мкВт/см2, то работать он может в течение:
Т = ЭЭ/ППЭ = 200/500 = 0.4 (ч) = 24 (мин)
Измерить ППЭ можно с помощью специального прибора: измерителя плотности потока энергии (см. рисунок ниже)

Измеритель плотности потока энергии П3-41
На вопрос, влияет ли установленная шкала дальности на величину опасной зоны вблизи антенны, может ответить только руководство пользователя к конкретному образцу РЛС. Если изучаемая мощность изменяется с установкой большего предела измерения, тогда ответ утвердительный.
Поскольку, как отмечалось выше, на борту невозможно выполнить измерения по описанной методике, то наиболее простым решением будет принять меры предосторожности, рекомендованные производителем РЛС в руководстве по установке. Например, для локатора “JRC” модели «JMA 9832» с антенной «NKE-1079/1075» запрещено приближаться к излучающей поверхности ближе 1.1 метра.
Подводя итог, отмечу, что, в конечном счёте, приоритет при принятии решения об отключении оборудования или выполнении работ под излучением должен отдаваться безопасности судна и благополучию людей, находящихся на нём. Если у штурмана возникают малейшие сомнения по этому поводу, следует воздержаться от выполнения любых действий в зоне, попадающей под покрытие антеннами радиотехнических средств. Всегда существует возможность спланировать такие операции заранее и выполнить их в более спокойной обстановке с полным отключением всех источников излучения.
Автор: Андрей Чемодуров
Видеокурсы Key4mate: О Key4mateПозвольте рассказать вам о том,
что такое Key4mate

Здравстуйте друзья! Меня зовут Евгений Богаченко
Я штурман, автор и руководитель проекта Key4mate.
Главная цель проекта: помочь судоводителям подготовится к профессии и поддерживать их подсказками в ходе работы.
Создавая первый видеоурок мне хотелось сказать свое слово ЗА необходимость в изменении подходов подготовки молодых специалистов. Видеоуроки, которые систематизировали бы все знания полученные из разных источников, показались мне современным и очевидным решением.
Сегодня Key4mate это интернет-ресурс для общения, приобретения и обмена знаниями.
КАК ВСЕ НАЧИНАЛОСЬИдея проекта Key4mate зародилась в конце 2009 года. C последующего же рейса началась работа над созданием видеоуроков обо всём, чем занимается штурман на судне. Позже стало известно, что сама идея обучающих видеоуроков приходила на ум многим, но реализовать не удавалось.
первые видеоуроки были собраны в курс
“Руководство молодого штурмана”
Ужё в середине 2010 года началась работа над стилем проекта: логотип, дизайн и сайт. Большое внимание уделяется блогу Key4mate, где сложные темы объясняются простым и доступным языком.
Идея становится реальностью
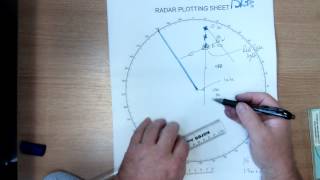
КАК ВСЕ НАЧИНАЛОСЬ 2011Публикуются видеокурсы на темы: «Корректура» и «Мореходная астрономия». Неожиданное для автора внимание получили созданные в этом году видеоуроки по маневренному планшету.
Key4mate – это уникальность и качество
КАК ВСЕ НАЧИНАЛОСЬ 2012Проект Key4mate набирает популярность. Присылаются отзывы с благодарностью. Некоторые отмечают заслугу проекта в их карьерном росте. Летом 2012 года в свет выходит «Руководство молодого штурмана (New Revision)» на двух DVD дисках, где видеоуроков накопилось уже на 17 часов.
Тема «Остойчивость» тоже входит в «Руководство молодого штурмана (New Revision)».
КАК ВСЕ НАЧИНАЛОСЬ 2013Работа над автоматическим ресурсом проекта Key4mate завершена. Новые видеокурсы публикуются сразу на сайте. Без задержек по времени, без рисков плохой записи на физический носитель и без затрат на доставку.
Доступ к информации в любой точке мира по прямым ссылкам на высокой скорости
КАК ВСЕ НАЧИНАЛОСЬ 2014Технологии растут, и проект Key4mate шагает в ногу со временем. Для записи видеоуроков используются камеры GoPro.
Традиционные качество, уникальность и доступность теперь в HD формате.
Радиолокаторы, детище противовоздушной обороны, впервые появились на военных кораблях в годы Второй мировой войны и первоначально использовались для обнаружения воздушных и надводных целей.







Втечение долгого времени использованию радиолокации на моторных и парусных яхтах, даже достаточно крупных, препятствовали неприемлемо большие размеры и значительное энергопотребление существовавших тогда радаров. Возможность их установки на относительно небольшие суда появилась лишь после широкого внедрения микроэлектроники, в первую очередь твердотельных СВЧ-приборов, микропроцессоров и больших жидкокристаллических матриц (экранов), позволивших в сочетании с современными методами обработки сигналов получить компактные, надежные, экономичные радары, удобные в эксплуатации даже на небольшом судне.
Назначение и работу радиолокатора хорошо иллюстрирует пришедшее из-за океана широко распространенное название: радар (RADAR) — аббревиатура Radio Detection And Ranging, т.е. радиообнаружение и измерение дальности.
Любой радиолокатор имеет три основных элемента — сканирующую антенну, приемопередатчик и дисплей. В современных судовых радарах два первых элемента объединяются в отдельный модуль, обычно называемый сканером.
При работе вращающаяся в горизонтальной плоскости антенна радара излучает вырабатываемые передатчиком короткие высокочастотные (так называемые «зондирующие») импульсы и принимает отраженные от различных объектов сигналы. Приемник выделяет отраженные сигналы из шумов и передает их на дисплей, где осуществляется обработка сигналов и отображение окружающего пространства на экране индикатора кругового обзора. Управляя работой радара и наблюдая на экране радиолокационную остановку вокруг судна, оператор производит визуальное обнаружение целей (под целью в радиолокации понимается любой обнаруженный радаром объект), измерение их дальности и азимута относительно судна.
ОСНОВНЫЕ ХАРАКТЕРИСТИКИ РАДАРОВ
Дальность обнаружения зависит от многих факторов — от отражательной способности цели (характеризуемой так называемой ЭПР — эффективной поверхностью рассеяния), ее контрастности по отношению к фону, высоты антенны и цели, состояния атмосферы и моря. Поэтому данная характеристика задается дифференцированно по типам целей и условиям работы радара.
Обычно в паспортных данных на судовые радары приводят максимальную (инструментальную) дальность, которая для подавляющего большинства компактных яхтенных радаров составляет 16 или 24 морские мили.
В реальных условиях радиолокационное наблюдение ведется, как правило, на меньших расстояниях, определяемых потребностями судовождения. В этих случаях использование развертки экрана с максимальной дальностью нецелесообразно, так как это приводит к существенной избыточности информации и к уменьшению размеров цели, что затрудняет ее обнаружение. Поэтому в радарах существует несколько так называемых шкал дальности — значений, в пределах которых может работать радар. Например, популярный среди владельцев небольших судов радар Furuno M1712 имеет следующий набор шкал:
Такое большое количество шкал позволяет получать общее представление об окружающем пространстве на больших расстояниях, а также детальное радиолокационное изображение на дальностях, представляющих наибольший интерес с точки зрения обеспечения безопасности плавания.
Ошибки определения координат цели
Для любого навигационного прибора, определяющего местоположение, важнейшим показателем является ошибка определения местоположения. Судовой радар определяет две координаты цели — дальность относительно антенны и направление (азимут) относительно линии направления (истинного, магнитного, направления движения). Ошибка определения расстояния портативных радаров обычно составляет (0,9 –1,0) % от максимального значения используемой шкалы дальности, ошибка определения направления равна ё1o.
Скорость вращения антенны
Этот параметр определяет скорость обновления информации на экране радара, что особенно важно при управлении скоростными судами. Скорости вращения антенн портативных радаров достаточно высокие: так, у уже известного нам М1712 она составляет 24 об/мин.
Функциональные возможности радаров определяют удобство работы с прибором и способность получения той или иной информации. Рассмотрим возможности современного радара.
Обнаружение любых объектов осуществляется визуально на экране локатора. Небольшие объекты — суда, буи, островки — отображаются в виде ярких точек на фоне различных помех — от собственных шумов приемника, от волн и атмосферных осадков, маскирующих отметки от целей.
Как уже отмечалось выше, судовой радиолокатор определяет две координаты в своей местной системе — дальность и азимут относительно судна.
Дальность до цели может определяться тремя способами — с помощью колец дальности, с помощью курсора и с помощью маркера переменного расстояния VRM.
Если посмотреть на экран радара, первое, что бросается в глаза, — это находящиеся на нем концентрические кольца. Количество колец и расстояния между ними жестко связаны с используемыми шкалами дальности. Для измерения расстояния до цели достаточно подсчитать количество колец между ее отметкой и центром экрана, умножить это число на расстояние между кольцами и прибавить оцененное на глаз приблизительное расстояние от отметки до внутренней кромки ближайшего по направлению к центру кольца. Понятно, что такой способ дает наглядную и быструю, но весьма грубую оценку, поэтому для получения точных значений используют два других способа.
Для точных измерений могут быть использованы курсор и подвижный маркер расстояний VRM.
Курсор — это отметка на экране в виде перекрестия, управляемая с помощью клавиш или трэкбола. Чтобы измерить дальность до цели, достаточно поместить перекрестие на внутреннюю границу отметки, после чего искомое значение вместе со значением азимута высветится в углу экрана.
Маркер расстояний — это кольцо на экране, радиус которого может выбираться оператором. Изменяя величину радиуса, совместите наружную кромку кольца с внутренней границей отметки цели — и вы получите значение расстояния до цели, высвеченное в углу экрана.
Направление отсчитывается от курсовой линии — вертикальной линии на экране, совпадающей с диаметральной плоскостью судна. При наличии магнитного компаса или гирокомпаса, сопрягаемого с радаром, отсчет азимута может производиться от магнитного или истинного направления на север.
Измерение направления может осуществляться либо с помощью курсора (аналогично показанному выше измерению дальности), либо с использованием линии электронного маркера пеленга (EBL).
Электронный маркер пеленга (EBL) — это исходящая из центра экрана линия (иногда называемая «линией электронного пеленга»), положением которой может управлять оператор. С помощью органов управления наводят маркер на середину отметки, после чего считывают высвеченные в углу экрана значения азимута либо определяют их по шкале направлений, находящейся на краю экрана.
При сопряжении радара с приемником спутниковой навигации или приемоиндикатором радионавигационных систем «Лоран» или «Декка» он может определять и высвечивать на экране широту и долготу выбранных целей.
Помимо решения основных задач — обнаружения и определения координат целей — современные радиолокаторы обладают набором функций, позволяющих существенно расширить их возможности.
Известный нам радиолокатор М1712 состоит из двух элементов — дисплея с 7-дюймовым (17,5 см по диагонали) жидкокристаллическим монохромным экраном и закрытым 15-дюймовым (38 см в диаметре) сканером, обеспечивающим дальность действия 24 мили. Некоторые модели радаров могут работать с различными сканерами, как с закрытой, так и с открытой антеннами (например, Furuno M1722C, М1732C, М1752C из серии радаров NavNet).
Характерной особенностью современных радаров является многооконный режим работы дисплея. Помимо основного радиолокационного изображения, в нижней части экрана располагаются так называемые «Data Boxes» — окна, в которых находится навигационная информация, получаемая от связанных с радаром датчиков — компаса, приемника GPS, эхолота, лага, а также данные о положении на экране курсора и маркеров направления и дальности.
В ряде современных радаров с помощью дополнительных экранных окон можно выделить сектор контроля, положение курсора, получить графическое изображение «Hayway», используемое в приемниках GPS для судовождения по путевым точкам и маршрутам. И, наконец, можно наблюдать общую радиолокационную картину одновременно с выделенным и растянутым участком находящегося на экране пространства.
Однако на этом не заканчиваются все возможности полиэкрана: новейшие радары производства Furuno, JRC, Raymarine и некоторых других компаний позволяют получать на экране цветную электронную карту, радиолокационную картину окружающего пространства, а также оба изображения одновременно. При этом выполняются все функции, присущие радару при работе в режиме картплоттера: отображение карты, обозначение своего места и трассы движения, создание, хранение и использование путевых точек и маршрутов, характеристики движения и пр.
Для сокращения объема аппаратуры в рубках небольших судов на радары стали возлагать функции и других приборов — рыбопоисковых эхолотов, погодных факсов, приемников метео- и навигационных сообщений службы НАВТЕКС. Достигается это с помощью дополнительных приборов — «черных ящиков», подключаемых к радару, как это делается в моделях Furuno M1823C, М1833С, М1933С.
В настоящее время производители судовой радиоэлектроники выпускают большое количество моделей радиолокаторов для малого флота. В прилагаемой таблице приведены сравнительные характеристики некоторых наиболее распространенных и допущенных к использованию в нашей стране радаров.
Сравнительные характеристики эхолотов