Категория: Инструкции
Программирование гироскопического датчика на основе легомайндстормс ево3.
Введение 2 слайд
Гироскоп в переводе с древнегреческого языка означает смотреть вращение — это устройство, которое способно измерить у связанного с ним предмета изменение углов его ориентации относительно инерциальных систем координат и которое основано на законе сохранения момента импульса. Гироскопы от количества степеней свободы подразделяются на двухстепенные и на трехстепенные. А по своему принципу действия гироскопы могут делиться на механические гироскопы и оптические гироскопы. Также принято гироскопы делить по режиму их действия на указатели направления и датчики угловой скорости. Зачастую одни устройства могут функционировать в различных режимах и это зависит от типа управления.
Гироскоп изобрёл Иоганн Боненбергер и опубликовал описание своего изобретения в 1817 году. Термин впервые введен Ж. Фуко в его докладе в 1852 году во Французской Академии Наук. Доклад был посвящён способам экспериментального обнаружения вращения Земли винерциальном пространстве. Этим и обусловлено название «гироскоп».
В 1852 году французский учёный Фуко усовершенствовал гироскоп и впервые использовал его как прибор, показывающий изменение направления (в данном случае — Земли), через год после изобретения маятника Фуко, тоже основанного на сохранении вращательного момента [7]. Именно Фуко придумал название «гироскоп». Фуко, как и Боненбергер, использовал карданов подвес. Не позже 1853 года Фессель изобрёл другой вариант подвески гироскопа.
Преимуществом гироскопа перед более древними приборами являлось то, что он правильно работал в сложных условиях (плохая видимость, тряска, электромагнитные помехи). Однако вращение гироскопа быстро замедлялось из-за трения.
Свойства гироскопа используются в приборах — гироскопах, основной частью которых является быстро вращающийся ротор, который имеет несколько степеней свободы (осей возможного вращения).
Чаще всего используются гироскопы, помещённые в карданов подвес. Такие гироскопы имеют 3 степени свободы, то есть он может совершать 3 независимых поворота вокруг осей, пересекающихся в центре подвеса, который остаётся по отношению к основанию неподвижным.
Гироскопы, у которых центр масс совпадает с центром подвеса. называются астатическими, в противном случае — статическими гироскопами.
Для управления гироскопом и снятия с него информации используются датчики угла и датчики момента.
Гироскопы используются в виде компонентов как в системах навигации (авиагоризонт, гирокомпас, ИНС и т. п.), так и в системах ориентации и стабилизации космических аппаратов.
Описание 5 слайд
Гироскопический датчик определяет вращательное движение. Если вы вращаете гироскопический датчик по направлению стрелок на корпусе датчика, то датчик сможет определить скорость вращения в градусах в секунду. Можно использовать скорость вращения для определения, например, времени поворота части вашего робота или времени его переворота.
Кроме того, гироскопический датчик регистрирует общий угол вращения в градусах. Вы можете использовать этот угол вращения для того, чтобы определить, например, насколько повернулся ваш робот.
Гироскопический датчик может выдавать следующие данные:
Характеристики 6 характеристики
цифовой гироскопический датчик EV3 позволяет измерять движение вращения робота, а также улавливать изменения в его движении и положении. С помощью этого датчика легко можно измерить углы, создать балансирующего робота и исследовать технологии, которые используются в настоящих навигационных системах и игровых контроллерах.
• Режим измерения углов с точностью до +/- 3 градуса
• Встроенный гироскоп улавливает вращения с моментом до 440 град/с
• Частота опроса до 1 кГц
• Автоматическая идентификация программным обеспечен

На данном роботе используется гироскопический датчик нового поколения.
Все началось с изучения гироскопических устройств и мы задались вопросом о его применении и устройсва. В комплектах с коробкой лего присутствовали гироскопические датчики.
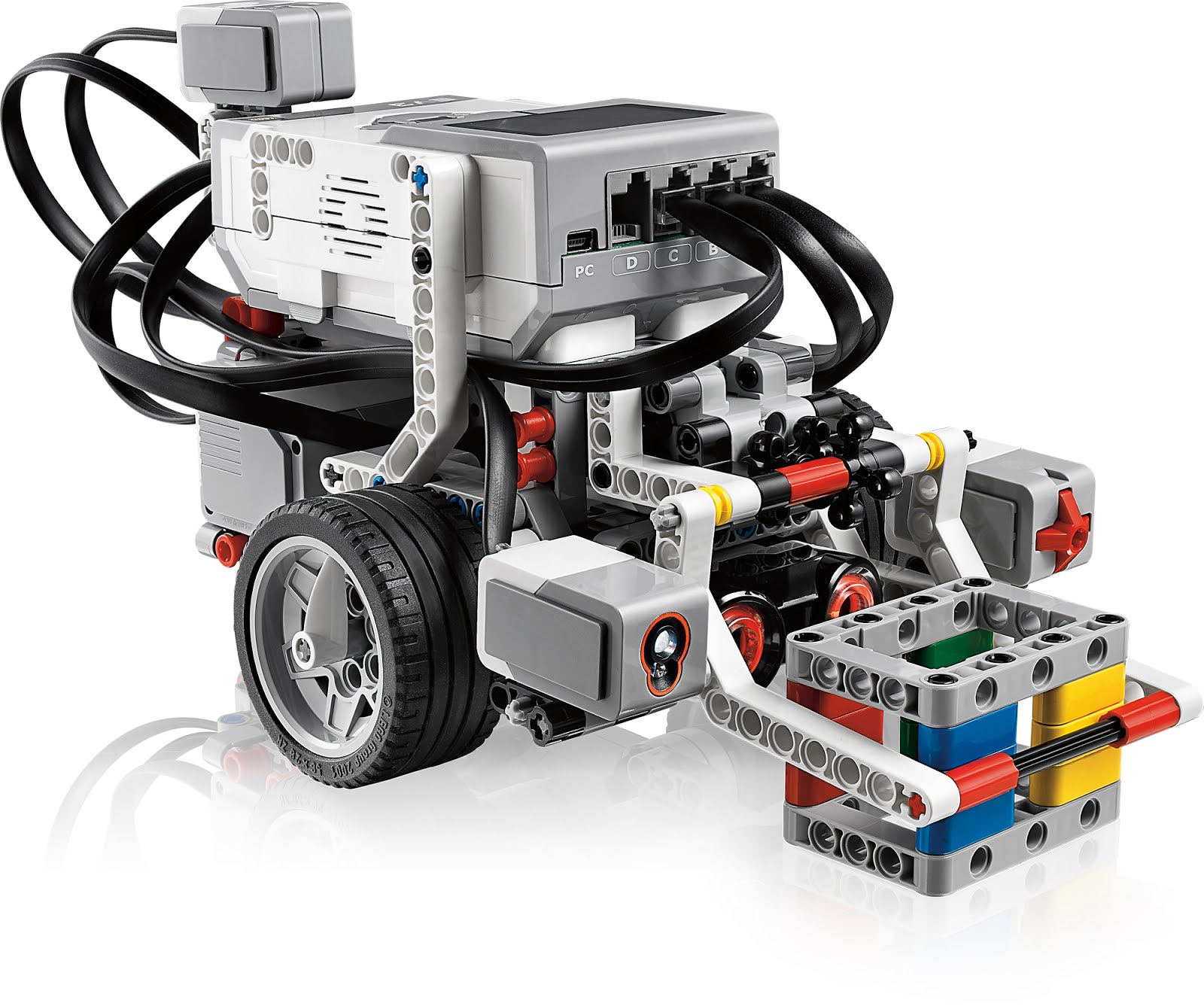
Затем у нас возникла идея собрать двухколесного робота который держит равновесие с помощью гироскопического датчика.
Мы собрали этого робота на основе Lego Mindstorms evo3.
Следующим нашим шагом стало программирование. При программировании мы сталкивались с разными видами проблем.
По началу наш робот падал и держал равновесия не более 2-х секунд, однако, после некоторой доработки программы нам удалось достичь желаемого результата.




















Задача данного курса - познакомить вас с конструктором Lego mindstorms. Научить собирать базовые конструкции роботов, программировать их под определенные задачи, разобрать с вами базовые решения наиболее распространенных задач-соревнований.
Курс рассчитан на делающих первые шаги в мир робототехники с помощью конструктора Lego mindstorms. Хотя все примеры роботов в этом курсе сделаны с помощью конструктора Lego mindstorms EV3, программирование роботов объясняется на примере среды разработки Lego mindstorms EV3, тем не менее, владельцы Lego mindstorms NXT тоже могут присоединиться к изучению данного курса, и, надеемся, найдут для себя тоже полезное.
1.1. Что в наборе? Классификация деталей, крепление деталей между собой, главный блок, моторы, датчикиДавайте начнем знакомиться с конструктором Lego mindstorms EV3. Распечатав конструктор, мы найдем в нем множество разнообразных деталей. Если вы знакомы с традиционными кирпичиками Lego, но раньше вам не приходилось сталкиваться с наборами Lego серии Technic, ты, возможно, вы будете слегка обескуражены видом непривычных деталей. Однако, разобраться с ними совсем несложно. Итак, условно разделим все детали на несколько категорий. На рисунке представлены детали, называемые балками (иногда для этих деталей можно встретить название - бим (beam)) Балки исполняют роль каркаса (скелета вашего робота),

Следующая группа деталей служит для соединения балок между собой, с блоком и датчиками. Детали, имеющие крестообразное сечение, называются осями (иногда штифтами) и служат для передачи вращения от моторов к колесам и шестерням. Детали, похожие на цилиндры (имеющие в сечении окружность) называются пинами (от англ. pin - шпилька),

Представленный ниже рисунок демонстрирует вам различные варианты соединения балок с помощью пинов.

Следующую группу деталей называют коннекторами. Их главная задача - соединение балок в различных плоскостях, изменение угла соединения деталей и подсоединение датчиков к роботу.

Переходим к следующей группе деталей. Шестерни предназначены для передачи вращения от моторов к другим элементам конструкции робота. Как правило, это колеса, но в тоже время шестерни могут широко применяться и в различных конструкциях роботов, не предполагающих вращение. С ними мы непременно еще не раз встретимся при конструировании сложных механизмов.

Ну и, конечно же, движение в пространстве нашему роботу обеспечивают различные колеса и гусеницы, представленные в наборе.

Следующая группа деталей несет в себе декоративные функции. С их помощью мы можем украсить нашего робота, придать ему неповторимый вид.

В набор Lego mindstorms EV3 входят два больших мотора. Моторы выполняют роль мышц или силовых элементов нашего робота. Большие моторы, наиболее часто используются для передачи вращения на колеса, тем самым, обеспечивая движение робота. Можно сказать, что эти моторы выполняют ту же роль, что и ноги человека.

Один средний мотор, который также входит в набор Lego mindstorms EV3 выполняет роль движущей силы для различного навесного оборудования робота (клешни, модули захвата, различные манипуляторы) По аналогии с большими моторами отведем среднему мотору ту же роль, которую у нас выполняют руки.

Датчики, входящие в набор Lego mindstorms, представляют роботу необходимую информацию из внешней среды. Главная задача программиста - научиться извлекать и анализировать информацию, поступающую с датчиков, а затем подавать верные команды на моторы для выполнения определенных действий.

Ну и основным элементом нашего конструктора является главный блок EV3. В этом корпусе заключен мозг нашего робота. Именно здесь выполняется программа, получающая информацию с датчиков, обрабатывающая её и передающая команды моторам.

Настало время - собрать нашего первого робота.
На первом этапе конструкция нашего робота будет следующей:
Такой простейший робот называется роботом-тележкой.
Вы можете попробовать поэкспериментировать или собрать робота по предложенной инструкции в зависимости от версии вашего набора EV3:
Lego mindstorms EV3 Home

Как только наш робот будет готов - начнем изучение среды программирования.
1.3. Знакомство со средой программированияПервым делом загружаем среду программирования Lego mindstorms EV3. В главном меню программы выбираем: "Файл" - "Новый проект" или нажимаем "+". показанный на рисунке стрелкой.

В одном проекте может находиться множество программ. Для того, чтобы проект корректно загружался в нашего робота необходимо в названии проекта и программ использовать только буквы латинского алфавита! Давайте назовем наш проект lessons (уроки), а первую программу - lesson-1 (урок-1). Для того, чтобы дать название проекту, воспользуемся главным меню программы: "Файл" - "Сохранить проект как. " Чтобы изменить название программы - следует сделать двойной щелчок мышью на её названии (program) и вписать свое название.
Включим центральный блок нашего робота. Для этого нажмем на центральную (самую темную) кнопку блока. С помощью USB-кабеля, идущего в комплекте с конструктором, подключим робота к компьютеру. Успешное подключение робота отразится на вкладке аппаратных средств программного обеспечения EV3 в правом нижнем углу программы.

Если подключение робота прошло успешно, то приступим к программированию и создадим нашу первую программу.
1.4. Наша первая программа!Давайте научим нашего робота двигаться вперед на определенное расстояние. В нижней части экрана находится палитра программирования, каждому цвету палитры соответствуют различные группы программных блоков. Выберем зеленую палитру "Действие". Она содержит блоки управления моторами, блок вывода информации на экран, блок управления звуком и кнопками контроллера EV3 (главного блока). Выберем блок "Рулевое управление и перетащим его в область программирования (центральная область программы).

Каждая программа состоит из цепочки блоков, задающих определенное действие или проверяющих различные условия. Каждый блок имеет множество различных параметров. Первый, оранжевый блок с зеленым треугольником внутри называется - "Начало". Именно с него начинается любая программа для нашего робота. Второй блок установили мы. Повторю - он называется "Рулевое управление". Его назначение - одновременное управление двумя моторами.

Но, если вы собирали робота по инструкции, предложенной выше, то, наверное, обратили внимание, что в ней отсутствует схема подключения моторов и датчиков. Настало время с этим разобраться. Блок EV3 имеет 4 порта, обозначенных цифрами: 1. 2. 3. и 4. Эти порты служат для подключения только датчиков. Для подключения моторов служат порты, обозначенные буквами: A. B. C и D. Можно подключать моторы в любые свободные порты, предназначенные для них. Но в случае управляемой тележки рекомендовано подключать моторы в порты: B и C. Давайте сейчас возьмем два соединительных кабеля длиной 25 см, левый мотор подключим к порту B. а правый - к порту C. Именно это подключение выбрано по умолчанию в блоке "Рулевое управление". Специальная кнопка, обозначенная стрелкой, отвечает за режим работы блока. Для первой программы выберем режим: "Включить на количество оборотов". Значение 0 под черной стрелочкой на блоке означает прямолинейное движение, когда оба мотора крутятся с одинаковой скоростью. Число 75 задает мощность моторов, чем больше это значение, тем быстрее поедет наш робот. Цифра 2 задает количество оборотов каждого из моторов, на которое они должны провернуться.
Итак, наша первая программа готова. Загружаем ее в нашего робота. Для этого нажимаем кнопку "Загрузить" на вкладке аппаратных средств и отсоединяем USB-кабель от робота.

Устанавливаем робота на ровную поверхность. С помощью стрелок на блоке EV3 заходим в папку нашего проекта, выбираем программу lesson-1 и центральной кнопкой блока EV3 запускаем ее на выполнение.

Конструкторы LEGO Mindstorms - последнее слово в обучающих технологиях школьников от 10 лет. Наборы последнего поколения Mindstorms EV3 были анонсированы 4 января 2013, а в продажу поступили 1 августа 2013 года. При помощи такого набора даже пятиклассник может самостоятельно собрать, запрограммировать и запустить простейшего робота
Если вы никогда их не видели, то в этом нет ничего удивительного: для Беларуси это нечто абсолютно новое.
Чтобы иметь небольшое представление о чем же пойдет речь, посмотрите короткое видео о роботе-руке, построенном из EV3:
LEGO Mindstorms EV3 Education - это образовательный конструктор из 541 детали LEGO, 2 больших и среднего моторов, ультразвукового и гироскопического датчика, датчиков касания, цвета и микрокомпьютера EV3.
Микрокомпьютер EV3 - главная составляющая, мозг робота. Он управляет работой всех сенсоров и моторов, которые подключаются к нему проводами.






В этой статье я постарался дать обзор интерфейса новой среды разработки EV3. Следующая статья будет посвящена основному объекту среды EV3 - проекту.
Автор обзора благодарит официального дистрибьютора Lego Education в России - компанию "Стандарт" за предоставленный набор Lego Mindstorms EV3.
LEGO.com Education Образовательные решения - Средняя. * Используя Базовый набор LEGO® MINDSTORMS® Education EV3, вы можете собрать Стартовую модель. Гиробой, Ступенеход. Видео инструкции.Все о Lego Mindstorms Education EV3 | РоботБаза * 4 фев 2014. LEGO MINDSTORMS EDUCATION EV3 — это конструкторский набор программируемой робототехники. Гиробой, Ступенеход. Инструкции по сборке Lego Mindstorms EV3 | РоботБаза * 10 фев 2014. Инструкции по сборке Lego Mindstorms EV3. Модели из Базового набора LEGO® MINDSTORMS 45544 Education EV3. Ступенеход.Описание LEGO Mindstorms Education EV3 * LEGO MINDSTORMS Education EV3 это третье поколение. Первый LEGO Mindstorms RCX, был выпущен в 1998, основой для которого послужил микроконтроллер H8. Главная; Новости · Доставка · Оплата · Контакты · Инструкции и ПО · Статьи по Робототехнике. Слон, Знапп, СтупенеХод, РобоТанк. Сборка роботов из Ресурсного набора LEGO MINDSTORMS. * 24 июн 2014. Дополнив свой Базовый набор LEGO MINDSTORMS Education EV3 Ресурсным у вас появится. Инструкции по сборке моделей из Ресурсного набора LEGO MINDSTORMS Education EV3. Июн 24. Ступенеход.
Скорость: 7682 Kb/s