






Категория: Инструкции
Специально для энтузиастов малоразмерных мультикоптеров компания DJI создала облегченную версию легендарного полетного контроллера Naza M. Мощные алгоритмы стабилизации коптера, точные и малошумные датчики, поддержка GPS и компаса – теперь все это в одном корпусе небольшого размера. В сравнении со старшей сестрой, Naza Lite лишена возможности подключения системного подвеса Zenmuse, системного OSD для отображения полетных данных и нет возможности подключить модуль BlueTooth для регулировок и настройки с помощью смартфона. Функции полностью автоматического полета по точкам, так же исключены из Naza Lite.
Но ведь такой «тюнинг» нужен далеко не всем! Главное на что способна Naza воплотилось в небольшом корпусе с невысокой ценой, а именно:
Благодаря подключению опционального модуля GPS и компаса Ваш мультикоптер будет точно удерживать позицию даже при сильном ветре. Становятся доступными полетные режимы значительно облегчающие управление коптером: ориентация на точку взлета – ХоумЛок, и ориентация на установленный курс – КурсЛок. При установленном модуле GPS Ваш коптер при потере связи с передатчиком всегда вернется в то место, с которого он взлетел.
Встроенная защита от низкого напряжения в аккумуляторе, не позволит рухнуть на землю, сначала светодиодный индикатор будет моргать, а затем коптер самостоятельно произведет посадку. За этим следит отдельный модуль питания полетного контроллера, который можно подключить к любому аккумулятору от 2S до 6S.
Большое количество микшеров для квадрокоптера, гексокоптера и соосного трикоптера оставляет широкое поле для экспериментов.
Встроенное управление подвесом для камеры на сервоприводах, с компенсацией наклонов коптера, позволит запечатлеть Ваши красивые пролёты над полем или лесом, или сфотографировать дачу или дом с высоты птичьего полета.
Встроенная защита от самопроизвольного запуска моторов сохранит Ваши руки от ударов и синяков.
Чтобы идеально настроить Ваш коптер не понадобится часто взлетать и садиться, с помощью переключателя или ручки на Вашем передатчике регулировки вносятся во время полета в любой момент.
Три полетных режима смогут удовлетворить любые амбиции и запросы. Режим GPS позволит точно удерживать точку в пространстве, что удобно для фотографов. Режим Attitude позволит совершать изящные развороты и плавные пролеты по горизонтали, что не оставит равнодушным начинающего пилота. А режим Manual в котором доступны флипы, роллы и полет в перевернутом состоянии, удовлетворит все амбиции растущего мастера пилотажа. А постоянно работающий барометр в первых двух режимах гарантирует точное удержание высоты полета.
Широкие возможности подключения для традиционных приемников, для соединений типа PPM и возможность подключить приемник по шине Futaba S-Bus позволят использовать любую аппаратуру без ограничений.
В конструкции Вашего коптера можно использовать широкораспространенные регуляторы вращения двигателей с PWM в огромном ассортименте.
DJI Naza-M Lite + GPS - технические характеристики:


















Naza-M - DJI Wiki * Jan 24, 2013. Naza-M GPS Compass will greatly enhance performance for entry AP with. 3- axis gyroscope, 3-axis gyroscope and barometer in its light and. You can get better flight performance use Naza on the following DJI products.DJI Naza Installation and setup New Guide -- Part 1 - YouTube * Aug 31, 2012. Here is the DJI Naza installation, setup, Programming and Tips and Tricks Video guide (a 3. I am thinking of getting a NAZA M Lite with GPS.NAZA-M LITE * Данный аппарат я так понял это программно урезанная NAZA-M, т.е. к ней нельзя будет подключить. Там куча объявления по запросу: "DJI Naza - M Lite + GPS Combo". Может я чего в инструкции не допонял ?NAZA-M LITE * May 28, 2013. strictly follow these steps to mount and connect NAZA-M LITE on your. DJI and NAZA-M LITE is registered trademark of DJI Innovations.DJI Naza-M Lite Multi-Rotor Flight Controller * For entry-level enthusiasts, DJI now brings out the most cost-effective solution, the NAZA-M Lite flight control system. As the simplified version of NAZA-M. DJI Naza-M Lite - RC Groups * DJI has released Naza-M Lite, the most cost-effective entry level multi-rotor flight control system, which is the simplified version of Naza-M.DJI NAZA-M lite + GPS | Dronespecialist.nl * DJI RELEASED NAZA-M LITE MULTIROTOR FLIGHT CONTROL SYSTEM! For entry-level enthusiasts, DJI now brings out the most cost-effective solution, the. NAZA-M LITE - Страница 2 * Купил NAZA-M LITE. Не могу найти инструкцию на русском. Бегаю по форумам, но найти не могу. Подскажите, где живет такая. DJI Naza-M Lite Multirotor Gyro System w/ GPS - HeliPal * Buy DJI-Acc-Naza-M-Lite-GPS / DJI Naza-M Lite Multirotor Gyro System w/ GPS online at the lowest price. HeliPal is famous for their Fast Shipping, Low Price. DJI - How to Install the new Naza-M Lite Assistant Software - YouTube * Apr 22, 2014. DJI Lightbridge is a revolutionary 2.4G Full HD digital video downlink offering extremely powerful technology in a small and lightweight form.Полетный контроллер от DJI - FAQ DJI NAZA | FLYDrones * Инструкция на русском языке Полетный контроллер. NAZA M LITE Во время пере прошивки пропало питание, в связи с чем компьютер перестал. Build Your Own Drone DJI NAZA M Lite v1.1 With GPS Fast Free. * Jul 19, 2014. DJI NAZA M Lite v1.1 With GPS for QuadCopters, Y6 Hexacopters. Fast, Free UK Delivery ?107.00. Key features of the DJI NAZA GPS are. the DJI Naza M Lite Flight Controller with GPS/Compass *. flight control has never been so accessible. DJI#39;s cost-effective NAZA-M Lite flight control system is a simplified version of the NAZA-M. It features the same high.Naza-M Lite - Videos | DJI * How to Install the new Naza-M Lite Assistant Software. 2014-04-23. Naza-M Main ControllerFutaba Receiver Connection. 2013-04-25. DJI Naza M-Lite Combo with GPS – XHOVER, LLC * That#39;s right! Flight Controller with GPS for under 0.00! Please note: Naza-M Lite is not compatible with Naza-M V2 PMU or BEC/LED. Introducing the all new. DJI NAZA-M Lite. - RC Groups * DJI has released Naza-M Lite, the most cost-effective entry level multi-rotor flight control system, which is the simplified version of Naza-M.DJI NAZA-M LITE GPS COMBO SET [DJI-NAZALSET] - 9.99. * Please note: Naza-M Lite is not compatible with Naza-M V2 PMU or BEC/LED. DJI now brings out the most cost-effective solution, the NAZA-M Lite flight. Naza-M Control Mode Switch - DJI Wiki * Mar 4, 2013. 1 Naza-M Control Mode Switch Setting Conditions; 2 Naza-M. to specific control mode, you will see the high-light as shown following.NAZA-M Lite With GPS UNIT (NEW VERSION) - UAV PRODUCTS * NAZA-M Lite With GPS UNIT (new Version with BEC and LED) FREE 2 DAY. DJI F550 Hexa ARF (Almost Ready to Fly) kit E300 propulsion included!Naza-M Lite - Downloads - Manuals, Software, Drivers download | DJI * Notice: 1. You can upgrade the newest Naza Firmware via above Naza Assistant software we provided. 2. You must re-configure your Naza with Naza Assistant.
Скорость: 5402 Kb/s
Особенности функциональные: самое актуальное это введение микшеров октокоптера, теперь Наза 2 может управлять всеми популярными моделями коптеров.
Вводится отдельная команда "Возврат домой", теперь не нужно настраивать ФейлСейф на тумблер, а в случае необходимости судорожно щелкать тумблером полетных режимов намереваясь срочно вернуть контроль.
Другие датчики, другой процессор и расширенные алгоритмы просчета параметров полета что даст нам более плавный полет и меньше проблем с управляемостью. Наконец то введена автоматическая корректировка курса при небольшом (около 5 градусов в каждую сторону), отклонении модуля компаса в горизонтальной плоскости.
С введением нового БЭКа с шиной CAN появится возможность подключить фирменное iOSD, новый светодиод со встроенным блютузом (для корректировки параметров с помощью планшета или смартфона) и полноценная связь с новым подвесом для камеры Go Pro Hero 3/3+/4, который является микроверсией известного Zenmuse. Впрочем, новый БЭК доступен и для Назы первой версии, что несказанно радует.
Контроллер Naza M V2 - 1 штука
Размеры модуля контроллера Naza: 45.5x32.5x18.5 мм
Вес модуля контроллера Naza: 27 гр
Максимальная скорость разворота вокруг своей оси: 200 о / сек
Максимальный угол наклона: 35 о
Максимальная скорость набора высоты: 6 м / с
Максимальная скорость спуска: 4,5 м / с
Точность удержания позиции в режиме GPS по вертикали: +-0,8 м
Точность удержания позиции в режиме GPS по горизонтали: +-2,5 м
Рабочая температура: от -10 о С до +50 о С
Энергопотребление пиковое: 1,5 Вт
Энергопотребление рабочее: 0,6 Вт
Напряжение на контроллере Naza: 4,5 - 5,5 В
Напряжение на блоке BEC/LED: 7,2 - 26 В
Рекомендуемый передатчик: 4 канала и более с частотой 2,4 ГГц
Рекомендованный аккумулятор: LiPo 2S-6S
Требуемая операционная система ПК: Windows XP sp3 / Windows 7 / Windows 8
Поддержка регуляторов хода: до 400 ГГц
3 режима автопилотирования
Режим Fail-safe
Защита от разрядки аккумулятора
Поддержка аппаратуры с интерфейсом D-Bus
Поддержка аппаратуры с интерфейсом PPM
Поддержка 2-осевого подвеса
Независимый блок PMU
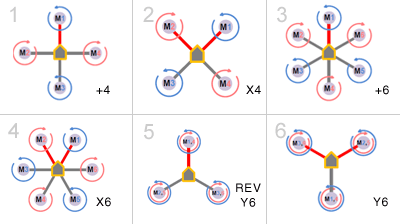
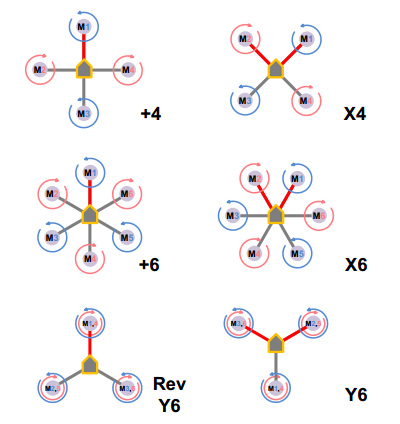
Поддержка мультироторных систем: +4; X4; +6; X6; Y6; REVY6; +8; V8; X8
Города и их области в которые регулярно происходят отправки:
Апрелевка • Балашиха • Бронницы • Верея • Видное • Волоколамск • Воскресенск • Высоковск • Дедовск • Дзержинский • Дмитров • Долгопрудный • Дрезна
• Домодедово • Дубна • Егорьевск • Железнодорожный • Жуковский • Зарайск • Зеленоград • Ивантеевка • Истра • Кашира • Климовск • Клин • Коломна • Королев • Котельники • Красноармейск • Красногорск • Краснозаводск • Краснознаменск • Куровское • Ликино-Дулево • Лобня • Лосино-Петровский • Луховицы • Лыткарино • Люберцы • Можайск • Москва • Мытищи • Наро-Фоминск • Ногинск • Одинцово • Ожерелье • Озеры • Орехово-Зуево • Павловский Посад • Подольск • Протвино • Пушкино • Пущино • Раменское • Реутов • Руза • Рошаль • Сергиев Посад • Серпухов • Солнечногорск • Ступино • Сходня • Талдом • Троицк • Фрязино • Химки • Хотьково • Черноголовка • Чехов • Шатура • Щербинка • Щёлково • Электрогорск • Электросталь • Электроугли • Юбилейный • Яхрома • Абакан • Архангельск • Астрахань • Барнаул • Белгород • Бийск • Благовещенск • Братск • Брянск • Великий Новгород • Владивосток • Владимир • Волгоград • Вологда • Воронеж • Горный Алтай • Екатеринбург • Иваново • Ижевск • Иркутск • Йошкар-Ола • Казань • Калининград • Калуга • Кемерово • Киров • Кострома • Краснодар • Красноярск • Курган • Курск • Ленинск-Кузнецкий • Липецк • Магнитогорск • Миасс • Москва • Набережные Челны • Находка • Нижневартовск • Нижний Новгород • Нижний Тагил • Новокузнецк • Новороссийск • Новосибирск • Норильск • Омск • Орёл • Оренбург • Пенза • Пермь • Петрозаводск • Ростов-на-Дону • Рязань • Самара • Санкт-Петербург • Саранск • Саратов • Смоленск • Сочи • Ставрополь • Старый Оскол • Стерлитамак • Сургут • Сыктывкар • Тамбов • Тверь • Тольятти • Томск • Тула • Тюмень • Улан-Удэ • Ульяновск • Уссурийск • Уфа • Хабаровск • Чебоксары • Челябинск • Чита • Южно-Сахалинск • Якутск • Ярославль
Информация на данном интернет-сайте, предназначена для ознакомления, не являясь при этом публичной офертой, определяемой положениями статьи 437 (2) ГК РФ. Чтобы получить точную и актуальную информацию о стоимости товаров и услуг, а также их наличии, Вы можете обратиться к менеджерам компании.


Удивительно, но не все обычные, «хоббийные» контроллеры моторов правильно работают с DJI NAZA. Список контроллеров моторов со ссылками на коллег по цеху, которые собственноручно проверили их работоспособность с DJI NAZA.
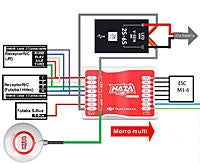
Настройка [править ] Калибровка передатчика [править ]После калибровки, движения слайдеров на шкалах должны повторять движения стиков и соответствовать следующим эволюциям коптера:
Если движения производятся в неправильных (обратных) направлениях, используйте кнопку справа (Rev/Norm) для реверсирования соответствующего канала.
Калибровка компаса [править ]Калибровку компаса следует произвести в обязательном порядке перед первым полётом коптера. Также, желательно производить калибровку компаса каждый раз перед полётам коптера в новом месте, хотя это может не оказывать значительного влияния на стабилизацию и многие этим пренебрегают. При калибровке нужно находиться в дали от массивных железных предметов (автомобили, гаражи, железобетонные конструкции), также ни в коем случае нельзя находиться под проводами ЛЭП.
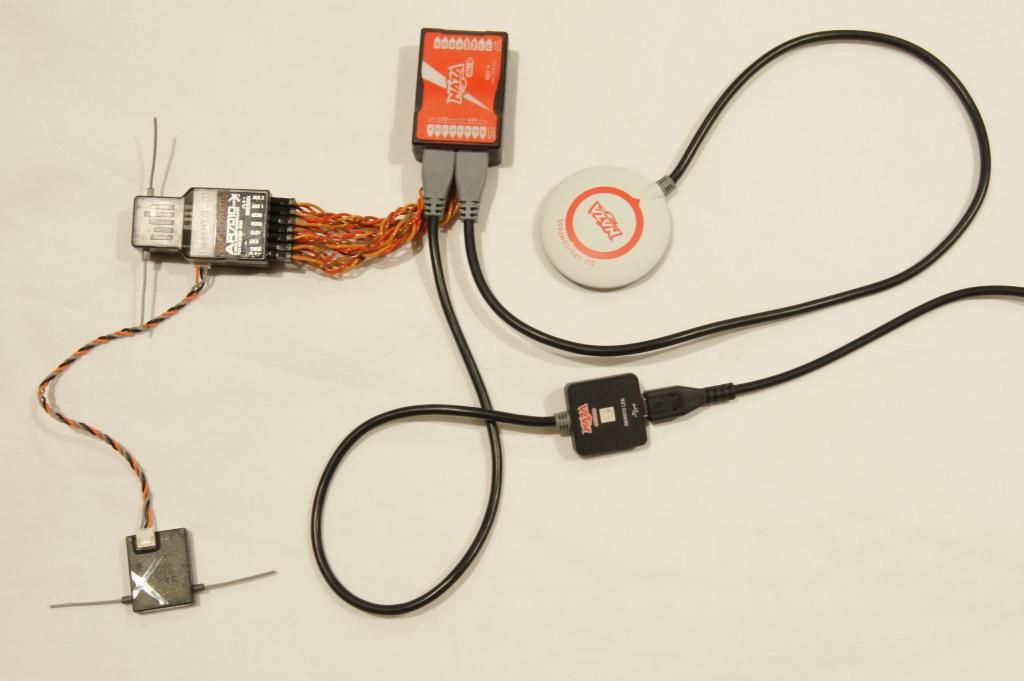
Прежде всего в настройках нужно указать расположение GPS-модуля (в котором располагается компас) относительно полётного контроллера, то есть смещения по осям X Y Z. Также нужно назначить переключение режимов GPS и Manual на 2-х или 3-х позиционный тумблер пульта аппаратуры радиоуправления. Далее, последовательность калибровки такая:
Если калибровка по каким-то причинам не была завершена, то светодиод загорится красным.
Строго говоря, вращаться должен сам коптер вокруг своей оси. Но просто держать его перед собой в руках и поворачиваться самому вокруг своей оси удобнее. Можно также практиковать вариант, держа коптер перед собой, ходить вокруг него так, чтобы он поворачивался, не смещаясь в горизонтальной плоскости.
Параметры [править ]Информация не проверена
Мнение: Непонятно, зачем это нужно, если можно сразу в No Load указать нужное напряжение, а в Loss оставить нули, эффект будет ровно тот же. [15]
Запуск/остановка моторов [править ] Запуск моторов [править ]По соображениям безопасности в полётном контроллере NAZA моторы включатся не просто при перемещении стика газа вверх, а только после того как будет проведена одна из четырех стартовых комбинаций. Эта процедура называется арминг.
Остановка моторов [править ]Существуют несколько способов остановки двигателей:
При обычном управлении коптер двигается вперёд при наклоне стика Тангажа (Elevator) вперёд, то есть направление полёта коптера вперёд задаётся направлением носовой части коптера.
Intellectual Orientation Control [править ]При использовании Интеллектуального Контроля Ориентацией (Intellectual Orientation Control, далее по тексту - IOC ), направление полёта и направление в котором указывает нос коптера могут не совпадать. Для пилота это сильно упрощает управление полётом коптера в определённых ситуациях или при недостаточном опыте.
Определите на вашем передатчике 2-х или 3-х позиционный тумблер, который будет переключать режимы IOC и подключите этот канал на вход Х2 полетного контроллера Naza. В каждом из положений тумблера регулируйте расходы канала (end-point) так, чтобы слайдер Х2 точно вставал на позиции Home Lock, Course Lock и OFF и соответствующая надпись подсвечивалась голубым светом. Обратите внимание на то, что переключая этот тумблер вы будете записывать ориентацию полета коптера в соответствующих режимах.
Course Lock [править ]В режиме КурсЛок (Course Lock) направление вперёд будет запоминаться и фиксироваться, то есть зависеть от записанного или перезаписанного направления на момент активации режима.
Порядок использования режима Course Lock:
В Режиме ХоумЛок (Home Lock) направление вперёд всегда указывает от точки взлёта (или точки Дом) на коптер, вне зависимости от направления носа коптера. То есть при перемещении стика тангажа (Pitch) от себя коптер будет двигаться от точки взлёта, при перемещении стика к себе - коптер будет двигаться к точке взлёта вне зависимости от фактического направления его носовой части.
Внимание! Режим Home Lock активируется на расстоянии только более 10 м от точки взлёта! А при возврате к точке взлёта и достижении коптером 10-метровой зоны режим Home Lock выключится автоматически!
Порядок использования режима Home Lock:
FAQ по NAZA пересены в отдельную статью.
Нерешённые проблемы [править ]У NAZA есть 2 вида моргания желтым: медленное (примерно 1 раз в секунду) и частое (примерно 2-3 в секунду). Если частые моргания
Это гарантирует устойчивую работу Tx при изменении температуры или других факторов влияющих на работу передатчикa и приемника. Для примера у меня Tx Futaba 14Mz режим Attitude 86% Manual 108% [28]
Видео [править ] Ссылки [править ] Где купить? [править ]